An auxiliary electric clock movement has a means of
keeping time even when the power is off. A spring-driven
movement is connected with synchronous electric movement in such a manner
that when the electric power fails, the spring-driven movement starts
operating and keeps the clock's hands moving. Earlier Telechron
auxiliary movements required manual winding of the mainspring, and later
ones were automatically wound.
Auxiliary movement ca. 1919
with a manually wound mainspring. The vertical rod on the left is
the pendulum that controls the timekeeping when the power is off.
When the power is on, the motor's field attracts and holds the pendulum
to the right so it cannot oscillate.
Auxiliary movement ca. 1926
with manually wound mainspring and balance wheel control for timkeeping.
The motor pulls a little finger that stops the balance wheel from
oscillating when the electric power is on.
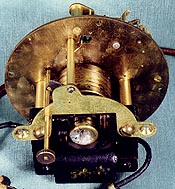
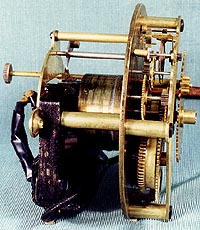
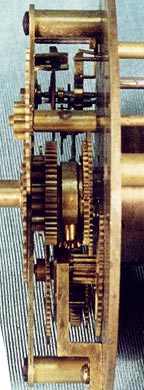
Below: A Telechron auxiliary
movement from ca. 1930.The motor winds a mainspring as it runs,
and a little finger (below, center photo) keeps the balance wheel
from oscillating as long there is power applied to the motor. When
the power fails, the finger moves out of the way and allows the
pin-lever escapement to start operating, keeping the hands on the
correct time. A differential gearing arrangement (lower right photo)
allows either the motor or the spring driven mechanism to move the
hands of the clock. Thanks to Bruce Hannon for donating this movement.